












Gửi bình luận
Giới nghiên cứu và phát minh đã phát triển robot trong gần 70 năm. Cho đến nay tất cả cỗ máy mà họ chế tạo đều có một điểm chung: chúng hoạt động bằng động cơ, thứ công nghệ có từ 200 năm trước.
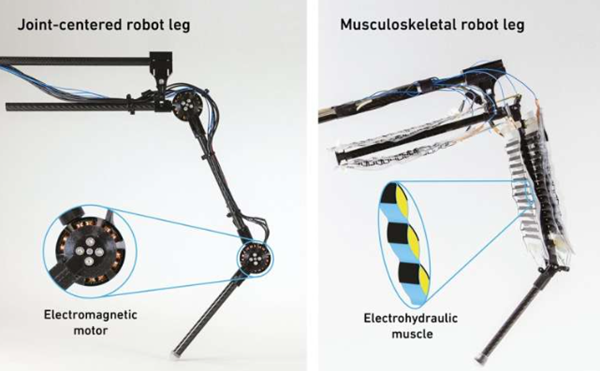
Robot biết đi cũng có tay chân được động cơ truyền năng lượng chứ không bằng cơ như con người và động vật. Đây là một phần lý do vì sao chúng thiếu khả năng di chuyển lẫn khả năng thích nghi như vật sống.
Để khắc phục khuyết điểm trên, Viện Công nghệ liên bang Thụy Sĩ (ETH Zurich) hợp tác Viện Nghiên cứu hệ thống thông minh Max Planck (MPI-IS) phát triển chân robot bằng cơ nhân tạo không chỉ tiết kiệm năng lượng hơn thiết kế truyền thống mà còn có thể thực hiện cú nhảy cao và chuyển động nhanh, phát hiện và phản ứng với chướng ngại vật. Chân robot này không cần đến cảm biến.
Nhóm nghiên cứu do Giáo sư ETH Zurich Robert Katzschmann cùng Giám đốc MPI-IS Christoph Keplinger dẫn đầu, có hai nghiên cứu sinh tiến sĩ là Thomas Buchner và Toshihiko Fukushima tham gia.
Tiết kiệm năng lượng
Giống như ở người và động vật, một cơ duỗi kết hợp một cơ gấp đảm bảo chân robot chuyển động được cả hai hướng. Cơ nhân tạo truyền động thủy lực tên HASEL, liên kết với khung bằng gân.
HASEL về cơ bản là túi nhựa chứa đầy dầu, khoảng một nửa mỗi túi được phủ điện cực màu đen làm bằng vật liệu dẫn điện ở cả hai mặt. Nghiên cứu sinh Buchner lý giải: “Khi chúng ta truyền điện vào điện cực thì chúng sẽ bị hút vào nhau do tĩnh điện, tương tự như khi tôi chà một quả bóng bay vào đầu mình, tóc sẽ dính vào bóng vậy”.
Nếu tăng điện áp, điện cực hút gần nhau hơn khiến dầu chảy sang một bên. Độ dài tổng thể của túi vì vậy mà rút ngắn. Một cơ co lại thì cơ đối diện duỗi ra. Nhóm nghiên cứu sử dụng mã máy tính giao tiếp với bộ khuếch đại điện áp cao để điều khiển HASEL.
Phân tích năng lượng bị chuyển đổi thành nhiệt, nhóm ghi nhận chân robot hoạt động bằng động cơ tiêu thụ nhiều năng lượng hơn đồng thời giữ nguyên tư thế cong, chân robot cơ nhân tạo không bị mất năng lượng (chuyển thành nhiệt), có khả năng là nhờ tĩnh điện. Do không sản sinh nhiệt nên không cần lắp bộ tản nhiệt hay quạt.
Thích ứng với địa hình
Khả năng nhảy của chân robot dựa trên khả năng nâng trọng lượng của chính nó. Chân robot cơ nhân tạo sở hữu khả năng thích ứng cao. Chỉ khi hệ thống cơ xương đủ độ đàn hồi thì mới thích ứng linh hoạt với địa hình tại chỗ.
“Chẳng khác gì với vật sống. Ví dụ nếu không thể uốn cong đầu gối thì đi bộ trên bề mặt không bằng phẳng trở nên khó khăn hơn rất nhiều”, theo Giáo sư Katzschmann.
Khác động cơ cần cảm biến liên tục chỉ ra góc của chân robot, chân robot cơ nhân tạo chọn vị trí phù hợp thông qua tương tác với môi trường. Quá trình này chỉ gồm tín hiệu uốn cong khớp và tín hiệu duỗi thẳng khớp.
Nghiên cứu sinh Fukushima giải thích: “Khi một người nhảy lên rồi tiếp đất, họ không cần nghĩ trước nên khuỵu gối 90 độ hay 70 độ. Nguyên tắc tương tự cũng áp dụng cho hệ thống cơ xương của chân robot. Khi tiếp đất thì khớp chân tùy thuộc bề mặt cứng hay mềm để điều chỉnh”.
Tiềm năng từ công nghệ mới
Lĩnh vực nghiên cứu về truyền động thủy lực vẫn còn khá mới mẻ, chỉ xuất hiện cách đây khoảng 6 năm. Lĩnh vực robot đang tiến bộ nhanh chóng với máy học và phương thức điều khiển tiên tiến, nhưng phần cứng lại ít tiến bộ hơn. Giám đốc Keplinger nhấn mạnh phát minh mới của họ là lời nhắc nhở về tiềm năng bước tiến mang tính đột phá đến từ khái niệm phần cứng mới như cơ nhân tạo.
Giáo sư Katzschmann cho biết HASEL khó có thể được sử dụng cho máy móc hạng nặng, nhưng đem lại lợi thế cho thiết bị tiêu chuẩn đặc biệt. Hiện tại nguyên mẫu cơ nhân tạo chỉ mới nhảy theo vòng tròn quanh một điểm cố định chứ chưa thể di chuyển tự do. Nhóm muốn phát triển một robot thực sự sử dụng công nghệ này.


.jpg "Việt Nam để quốc tang nguyên Chủ tịch nước Lào Khamtay Siphandone trong 2 ngày")






: Luật sư đề nghị SCB cung cấp số liệu")
